Registro aéreo
Fotografía aérea con globos y cometas
Registro aéreo
Fotografía aérea con globos y cometas
Registro aéreo
Mediante las secciones de este manual aprenderás a realizar los diferentes pasos del proceso de fotografía aérea con globos cautivos y cometas. Una forma sencilla de obtener imágenes aéreas de los espacios que estás investigando.
Registro aéreo
Mediante las secciones de este manual aprenderás a realizar los diferentes pasos del proceso de fotografía aérea con globos cautivos y cometas. Una forma sencilla de obtener imágenes aéreas de los espacios que estás investigando.
Manual de vuelo
Construcción de estabilizadores
- Mediante este manual aprenderás a construir dos tipos de soportes de cámara para fotografia aérea con globos cautivos y cometas y a anclarlos correctamente en la línea de vuelo.
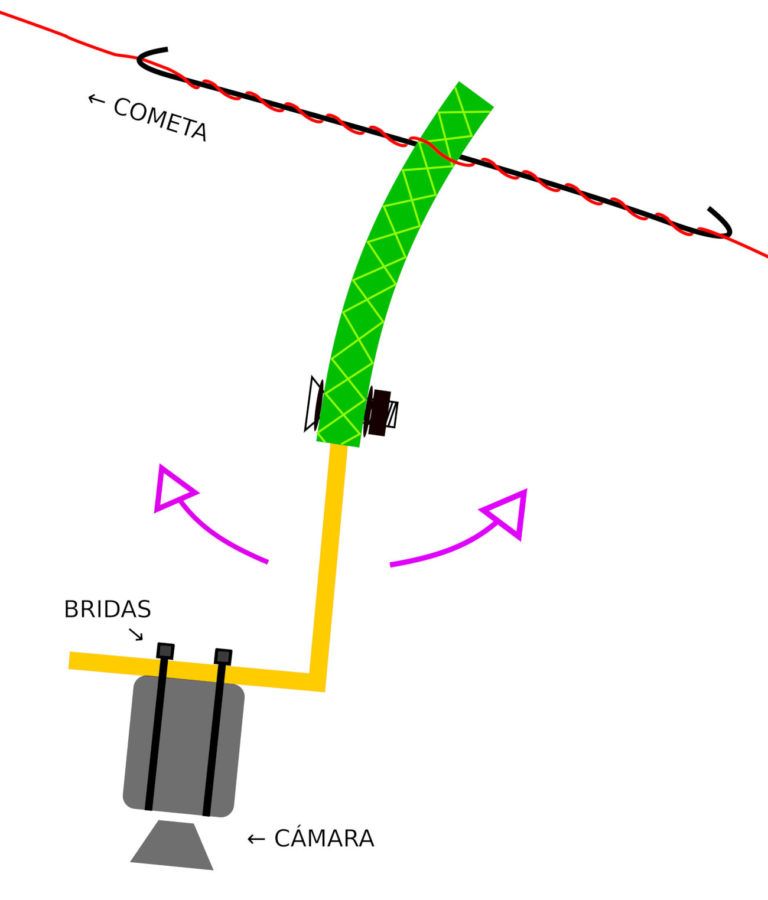
- El soporte de Péndulo es sencillo de construir y su anclaje en la linea más fácil.
- El soporte Picavet es más complejo tanto en su construcción como en su anclaje a la línea de vuelo. Sin embargo, el soporte Picavet es más estable durante el vuelo, resultando en una mejor captura de imágenes.
Péndulo
Materiales necesarios

Esquema de montaje
Anclaje en la línea de vuelo
Picavet
Materiales necesarios
Esquema de montaje
Anclaje en la línea de vuelo
Cámara PicaPiKAP
- Mediante esta guía aprenderás a construir y utilizar el dispositivo PicaPiKAP, una cámara fotográfica estabilizada mecánicamente para el mapeo con globos y cometas que dispone de diferentes sensores ambientales, altímetro y GPS.
- La PicaPiKAP es una cámara basada en la minicomputadora Raspberry Pi, ensamblada junto a los sensores ambientales en un soporte estabilizado Picavet, un dispositivo tan antiguo como la fotografía, diseñado en el año 1912 por el inventor Pierre Picavet.
- Pica de Picavet, Pi de Raspberry Pi y KAP de Kite Aerial Photography.

Materiales necesarios
Electrónica
- 1 RaspberryPi 3.
- 1 Módulo de cámara Raspberry Pi V2.
- 1 Módulo gps GT-U7.
- 1 Sensor BME280 de temperatura, humedad y presión atmosférica.
- 1 Tarjeta microSD clase 10 de 32gb.
- 1 Botón de pulsación.
- 1 Shield de Batería Lipo de 3800mAh.
- 10 Cables tipo jumper.
Soporte Picavet
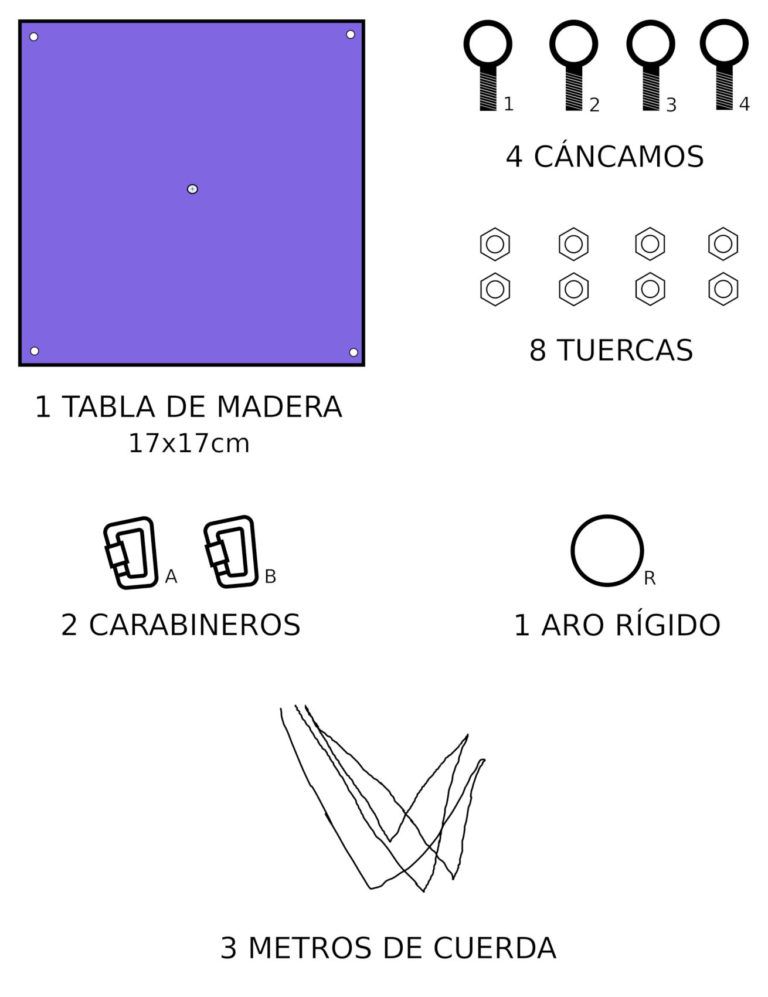
- 1 Caja de conexiónes de 15x10x7cm.
- 4 Cáncamos de métrica 5 (M5).
- 8 Tuercas autoblocantes.
- 10 Metros de cuerda de cometa.
- 2 Mosquetones o arandelas de metal ligero.
- 1 Aro de plástico o metal ligero.
- 50 Centímetros de alambre de 3mm.
Herramientas
- Taladro y brocas de 4 y 20mm.
- Cinta de doble lado o velcro adhesivo.
- Cuchilla.
- Llave inglesa.
- Alicate.
Conexiones de electrónica
El montaje consta de cinco elementos principales:
- 1 RaspberryPi 3.
- 1 Módulo de cámara Raspberry Pi V2.
- 1 Módulo gps GT-U7 con conexión UART.
- 1 Sensor BME280 (Temperatura-Humedad-Presión) con conexión SPI.
- 1 Botón de pulsación.
Para ensamblar la parte electrónica de la PicaPiKAP sigue el siguiente esquema:

El botón de pulsación sirve para apagar y encender la cámara. Si utilizas el shield de batería que enlazamos en la lista inicial de materiales probablemente no necesites este botón dado que consta de su propio interruptor de encendido y apagado pero en el caso que decidas alimentar la cámara con un powerbank de los de cargar el teléfono, este botón permitirá que apagues la cámara con un correcto cierre del sistema de archivos. Recuerda que la cámara es, en realidad, una computadora y el apagado debe realizarse correctamente para evitar la corrupción del sistema de archivos.
Soporte Picavet
Para la construcción del soporte estabilizador Picavet hemos empleado una caja de conexiones que permite abrirla y cerrarla con dos cierres sencillos. La electrónica puede montarse en todo tipo de recipientes.

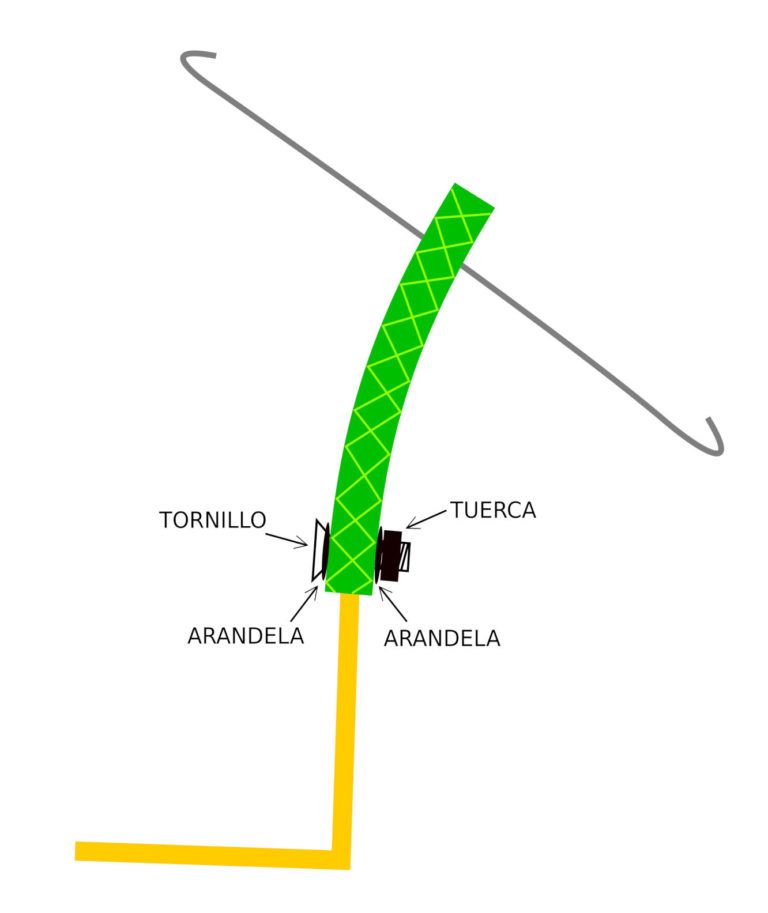
Para estabilizar la cámara hemos realizado cuatro agujeros en la parte posterior de la caja y le hemos atornillado cuatro cáncamos orientados en la misma dirección empleando ocho tuercas autoblocantes:

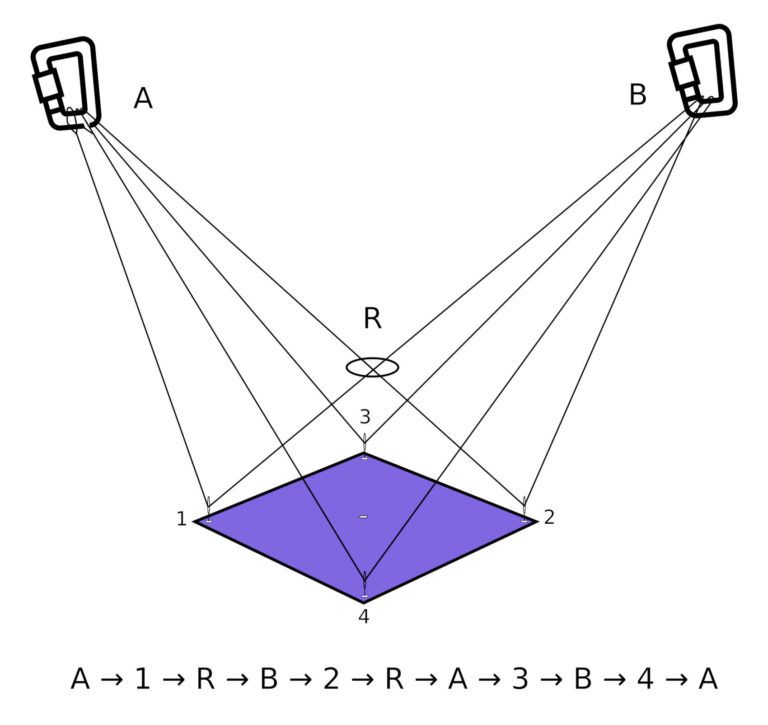
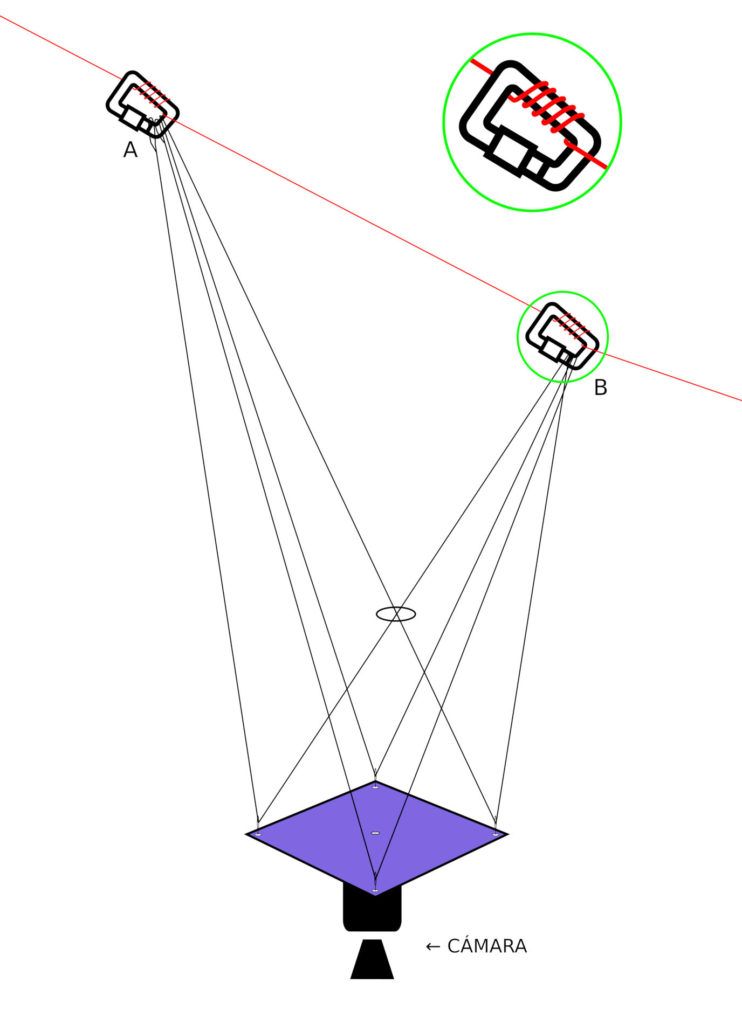
Una vez ajustados los cáncamos utilizaremos los 10 metros de cuerda de cometa y los dos mosquetones o dos arandelas ligeras. Ataremos la cuerda en la arandela o mosquetón A y seguiremos el siguiente esquema:
El anclaje a la línea de vuelo se realiza girándola varias veces alrededor de los mosquetones en el caso de esta imagen. La tensión de la línea de vuelo mantiene la cámara sin que se deslize por ella hacia abajo.


Para anclar todo el conjunto a la línea de vuelo hemos variado un poco el sistema respecto a anteriores versiones en las que los mosquetones se anclaban directamenta a la línea.
Construiremos este bucle con alambre de 3mm en el que engancharemos el mosquetón o la arandela y será en el alambre en el que enrollaremos la línea de vuelo, enganchando los mosquetones en el bucle inferior.


Software
La PicaPiKAP está costruída alrededor de la minicomputadora Raspberry Pi y dispone de un sistema operativo RaspberryOS, un port del sistema operativo Debian. Puedes descargar el sistema preconfigurado y listo para ser utilizado o instalar todos los elementos necesarios en una copia fresca del sistema RaspberryOS 32 bits utilizando el archivo instalador.sh de este repositorio. Si prefieres la segunda opción sigue las instrucciones en la parte superior del archivo de instalación.
Sistema preconfigurado
Si tan solo quieres utilizar la cámara sin muchas complicaciones te recomendamos que descargues en el siguiente enlace nuestro sistema operativo preconfigurado y listo para utilizar. Tan solo tienes que descargar la imagen de disco en el siguiente enlace, flashearla regularmente como un sistema operativo para Raspberry Pi usando Pi Imager e introducirla en tu Raspberry Pi. La cámara comenazará a disparar 3 segundos después del arranque.
- https://regist.ro/descargas/PicaPiKAP.tar.gz
- (md5sum:3ef87da2d23cdec2151c70795ba51826)
El sistema consta de dos particiones: "boot" y "rootfs". Tanto el programa de disparo como la carpeta de almacenamiento de las imágenes capturadas se encuentran en la partición "rootfs".
- Programa de disparo ubicado en /home/pi/PicaPiKAP/scripts/PicaPiKAP.py.
- Imágenes capturadas en /home/pi/PicaPiKAP/media.
Modo de empleo
Configurar fecha y hora
Dado que la Raspberry Pi no mantiene la fecha y la hora entre arranque y arranque y hemos prescindido de un módulo de reloj en tiempo real, la cámara obtiene la fecha y la hora conectándose a una red wifi. Para utilizar la PicaPiKAP debes cofigurar tu teléfono móvil para crear un punto de acceso wifi con las siguientes credenciales y actívalo antes de utilizar la cámara:
- Nombre de la red: picapikap
- Password: AutodefensaVecinal
De este modo, al arrancar, la PicaPiKAP se conectará a la red y se pondrá en hora. Es irrelevante si tienes conexión a internet porque la sincronización se hace en relación a la fecha y hora del teléfono móvil. La mayoría de los teléfonos móviles permiten ver si hay dispositivos conectados a su punto de acceso. Deberías poder comprobar si hay un dispositivo conectado y por lo tanto la cámara ha configurado correctamente fecha y hora.
Captura de imágenes
En cuanto la cámara se haya conectado a la red wifi para obtener fecha y hora podemos dejar que se eleve en el aire.
El programa de disparo viene configurado para disparar cada tres segundos. Si deseas cambiar el intervalo de tiempo entre foto y foto debes cambiar el número presente en la última linea "time.sleep(3)". Cambia el 3 por un 5 si quieres que la cámara dispare cada 5 segundos.
Por defecto, los datos ambientales se registran en el nombre de cada archivo: fecha y hora, altitud del barómetro, latitud, longitud, altitud del GPS, temperatura, humedad y presión atmosférica. La altitud viene duplicada al tener dos sensores que pueden determinarla, el sensor de presión atmosférica y el GPS. Hemos optado por su redundancia para asegurarnos el dato en el caso de que alguno de los dos sensores no funcione. Un ejemplo de nombre de archivo:
- 23Jan28_13:02:59_438.1m42.33586-7.80020_326.9m_11.5C_45.5%_961.7hPa.jpg
Para alterar la estructura del nombre de cada archivo es necesario introducir la tarjeta SD en tu computadora y editar la línea 32 del programa de disparo. Las definiciones de los valores disponibles están en la líneas 22 a 31. Aunque no tengas experiencia con código de programación, puedes hacerlo. Mantén la estructura de la siguiente línea y sustituye o elimina las palabras que definen cada valor (de las líneas 22 a 31). Recuerda de mantener la estructura respetando los espacios.
- camera.capture("/home/pi/PicaPiKAP/media/" + tiempo + altitud + latitud + longitud + altitudgps + temperatura + humedad + presion + ".jpg"
Recomendamos mantener, al menos, los valores "tiempo", "altitud", "temperatura", "humedad", y "presión". El tiempo es necesario para mantener el orden cronológico de las imágenes capturadas.
Descarga de imágenes
Una vez que hayas realizado tus fotografías, para descargar las imágenes extrae la tarjeta de la cámara e introdúcela en tu computadora. Verás en tu explorador de archivos las dos particiones: "boot" y "rootfs".
Las imágenes capturadas se almacenan en la partición "rootfs" en la ruta /home/pi/PicaPiKAP/media. Cópialas y pégalas en la memoria de tu computadora. Puedes eliminarlas al acabar de copiarlas para tener la tarjeta libre la próxima vez que la utilices.
También puedes conectarte a la cámara usando SSH. Nombre de usuaria pi y password AutodefensaVecinal.